



Docker镜像讲解
镜像是什么
镜像是一种轻量级、可执行的独立软件保,用来打包软件运行环境和基于运行环境开发的软件,他包含运行某
个软件所需的所有内容,包括代码、运行时库、环境变量和配置文件。
将所有的应用和环境,直接打包为docker镜像,就可以直接运行。
1、Docker镜像加载原理
UnionFs (联合文件系统)
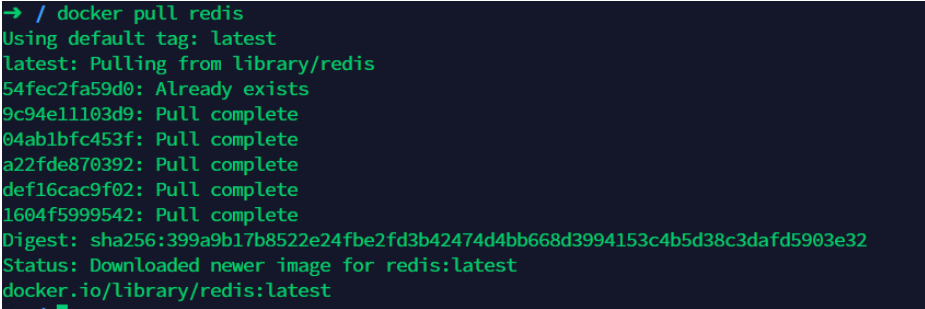
我们下载的时候看到一层层的下载就是这个。
UnionFs(联合文件系统):Union文件系统(UnionFs)是一种分层、轻量级并且高性能的文件系统,他支
持对文件系统的修改作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下(
unite several directories into a single virtual filesystem)。Union文件系统是
Docker镜像的基础。镜像可以通过分层来进行继承,基于基础镜像(没有父镜像),可以制作各种具体的应
用镜像。
特性:一次同时加载多个文件系统,但从外面看起来,只能看到一个文件系统,联合加载会把各层文件系
统叠加起来,这样最终的文件系统会包含所有底层的文件和目录。
Docker镜像加载原理
docker的镜像实际上由一层一层的文件系统组成,这种层级的文件系统UnionFS。
boots(boot file system)主要包含 bootloader和 Kernel, bootloader主要是引导加 kernel,
Linux刚启动时会加bootfs文件系统,在 Docker镜像的最底层是 boots。这一层与我们典型的
Linux/Unix系统是一样的,包含boot加載器和内核。当boot加载完成之后整个内核就都在内存中了,此时
内存的使用权已由 bootfs转交给内核,此时系统也会卸载bootfs。
rootfs(root file system),在 bootfs之上。包含的就是典型 Linux系统中
的/dev,/proc,/bin,/etc等标准目录和文件。 rootfs就是各种不同的操作系统发行版,比如 Ubuntu,
Centos等等。
平时我们安装进虚拟机的CentOS都是好几个G,为什么Docker这里才200M?
对于个精简的OS,rootfs可以很小,只需要包合最基本的命令,工具和程序库就可以了,因为底层直接用
Host的kernel,自己只需要提供rootfs就可以了。由此可见对于不同的Linux发行版, boots基本是一致
的, rootfs会有差別,因此不同的发行版可以公用bootfs.
虚拟机是分钟级别,容器是秒级!
2、分层理解
我们可以去下载一个镜像,注意观察下载的日志输出,可以看到是一层层的在下载 。
-
思考:为什么Docker镜像要采用这种分层的结构呢?
最大的好处,我觉得莫过于资源共享了!比如有多个镜像都从相同的Base镜像构建而来,那么宿主机
只需在磁盘上保留一份base镜像,同时内存中也只需要加载一份base镜像,这样就可以为所有的容器
服务了,而且镜像的每一层都可以被共享。
查看镜像分层的方式可以通过docker image inspect 命令
➜ / docker image inspect redis [ { "Id": "sha256:f9b9909726890b00d2098081642edf32e5211b7ab53563929a47f250bcdc1d7c", "RepoTags": [ "redis:latest" ], "RepoDigests": [ "redis@sha256:399a9b17b8522e24fbe2fd3b42474d4bb668d3994153c4b5d38c3dafd5903e32" ], "Parent": "", "Comment": "", "Created": "2020-05-02T01:40:19.112130797Z", "Container": "d30c0bcea88561bc5139821227d2199bb027eeba9083f90c701891b4affce3bc", "ContainerConfig": { "Hostname": "d30c0bcea885", "Domainname": "", "User": "", "AttachStdin": false, "AttachStdout": false, "AttachStderr": false, "ExposedPorts": { "6379/tcp": {} }, "Tty": false, "OpenStdin": false, "StdinOnce": false, "Env": [ "PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin", "GOSU_VERSION=1.12", "REDIS_VERSION=6.0.1", "REDIS_DOWNLOAD_URL=http://download.redis.io/releases/redis- 6.0.1.tar.gz", "REDIS_DOWNLOAD_SHA=b8756e430479edc162ba9c44dc89ac394316cd482f2dc6b91bcd5fe1259 3f273" ], "Cmd": [ "/bin/sh", "-c", "#(nop) ", "CMD [\"redis-server\"]" ], "ArgsEscaped": true, "Image": "sha256:704c602fa36f41a6d2d08e49bd2319ccd6915418f545c838416318b3c29811e0", "Volumes": { "/data": {} }, "WorkingDir": "/data", "Entrypoint": [ "docker-entrypoint.sh" ], "OnBuild": null, "Labels": {} }, "DockerVersion": "18.09.7", "Author": "", "Config": { "Hostname": "", "Domainname": "", "User": "", "AttachStdin": false, "AttachStdout": false, "AttachStderr": false, "ExposedPorts": { "6379/tcp": {} }, "Tty": false, "OpenStdin": false, "StdinOnce": false, "Env": [ "PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin", "GOSU_VERSION=1.12", "REDIS_VERSION=6.0.1", "REDIS_DOWNLOAD_URL=http://download.redis.io/releases/redis- 6.0.1.tar.gz", "REDIS_DOWNLOAD_SHA=b8756e430479edc162ba9c44dc89ac394316cd482f2dc6b91bcd5fe1259 3f273" ], "Cmd": [ "redis-server" ], "ArgsEscaped": true, "Image": "sha256:704c602fa36f41a6d2d08e49bd2319ccd6915418f545c838416318b3c29811e0", "Volumes": { "/data": {} }, "WorkingDir": "/data", "Entrypoint": [ "docker-entrypoint.sh" ], "OnBuild": null, "Labels": null }, "Architecture": "amd64", "Os": "linux", "Size": 104101893, "VirtualSize": 104101893, "GraphDriver": { "Data": { "LowerDir": "/var/lib/docker/overlay2/adea96bbe6518657dc2d4c6331a807eea70567144abda686588ef6 c3bb0d778a/diff:/var/lib/docker/overlay2/66abd822d34dc6446e6bebe73721dfd1dc497c2 c8063c43ffb8cf8140e2caeb6/diff:/var/lib/docker/overlay2/d19d24fb6a24801c5fa639c1 d979d19f3f17196b3c6dde96d3b69cd2ad07ba8a/diff:/var/lib/docker/overlay2/a1e95aae5 e09ca6df4f71b542c86c677b884f5280c1d3e3a1111b13644b221f9/diff:/var/lib/docker/ove rlay2/cd90f7a9cd0227c1db29ea992e889e4e6af057d9ab2835dd18a67a019c18bab4/diff", "MergedDir": "/var/lib/docker/overlay2/afa1de233453b60686a3847854624ef191d7bc317fb01e015b4f06 671139fb11/merged", "UpperDir": "/var/lib/docker/overlay2/afa1de233453b60686a3847854624ef191d7bc317fb01e015b4f06 671139fb11/diff", "WorkDir": "/var/lib/docker/overlay2/afa1de233453b60686a3847854624ef191d7bc317fb01e015b4f06 671139fb11/work" }, "Name": "overlay2" }, "RootFS": { "Type": "layers", "Layers": [ "sha256:c2adabaecedbda0af72b153c6499a0555f3a769d52370469d8f6bd6328af9b13", "sha256:744315296a49be711c312dfa1b3a80516116f78c437367ff0bc678da1123e990", "sha256:379ef5d5cb402a5538413d7285b21aa58a560882d15f1f553f7868dc4b66afa8", "sha256:d00fd460effb7b066760f97447c071492d471c5176d05b8af1751806a1f905f8", "sha256:4d0c196331523cfed7bf5bafd616ecb3855256838d850b6f3d5fba911f6c4123", "sha256:98b4a6242af2536383425ba2d6de033a510e049d9ca07ff501b95052da76e894" ] }, "Metadata": { "LastTagTime": "0001-01-01T00:00:00Z" } } ]理解:
所有的 Docker镜像都起始于一个基础镜像层,当进行修改或培加新的内容时,就会在当前镜像层之
上,创建新的镜像层。
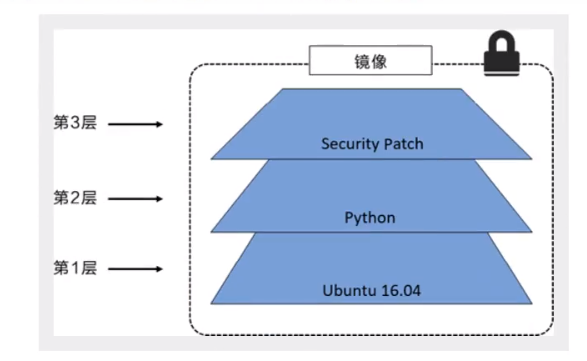
举一个简单的例子,假如基于 Ubuntu Linux16.04创建一个新的镜像,这就是新镜像的第一层;如果在
该镜像中添加 Python包,
就会在基础镜像层之上创建第二个镜像层;如果继续添加一个安全补丁,就会创健第三个镜像层该像当
前已经包含3个镜像层,如下图所示(这只是一个用于演示的很简单的例子)。
在添加额外的镜像层的同时,镜像始终保持是当前所有镜像的组合,理解这一点非常重要。下图中举了
一个简单的例子,每个镜像层包含3个文件,而镜像包含了来自两个镜像层的6个文件。
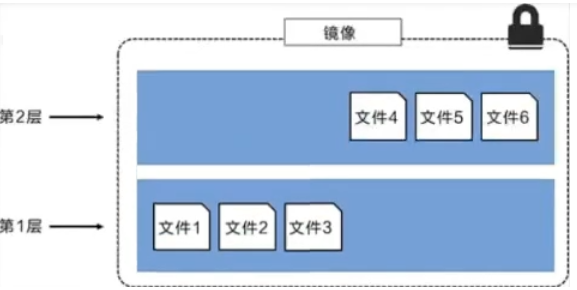
上图中的镜像层跟之前图中的略有区別,主要目的是便于展示文件
下图中展示了一个稍微复杂的三层镜像,在外部看来整个镜像只有6个文件,这是因为最上层中的文件7
是文件5的一个更新版
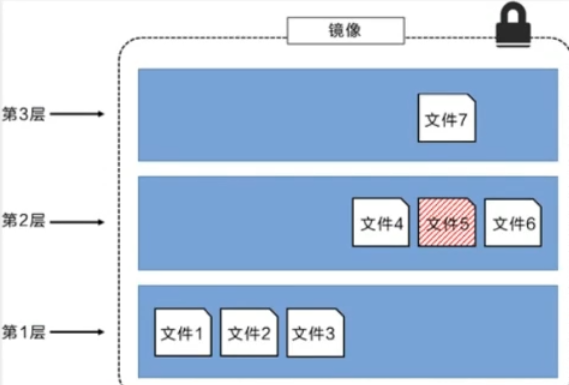
文种情況下,上层镜像层中的文件覆盖了底层镜像层中的文件。这样就使得文件的更新版本作为一个新
镜像层添加到镜像当中。
Docker通过存储引擎(新版本采用快照机制)的方式来实现镜像层堆栈,并保证多镜像层对外展示为统
一的文件系统。
Linux上可用的存储引撃有AUFS、 Overlay2、 Device Mapper、Btrfs以及ZFS。顾名思义,每种存储
引擎都基于 Linux中对应的。
件系统或者块设备技术,井且每种存储引擎都有其独有的性能特点。
Docker在 Windows上仅支持 windowsfilter 一种存储引擎,该引擎基于NTFS文件系统之上实现了分层
和CoW [1]。
下图展示了与系统显示相同的三层镜像。所有镜像层堆并合井,对外提供统一的视图。
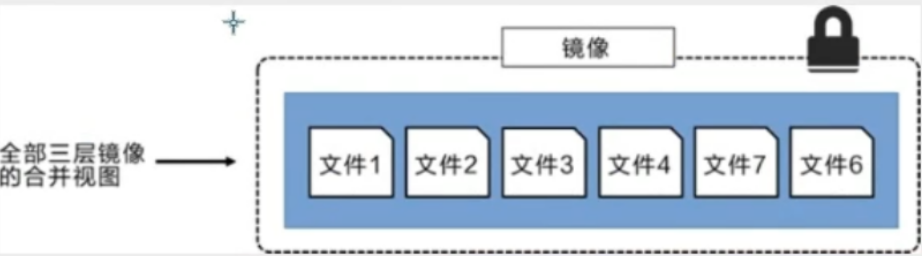
Docker 镜像都是只读的,当容器启动时,一个新的可写层加载到镜像的顶部!
这一层就是我们通常说的容器层,容器之下的都叫镜像层!
3、commit镜像
docker commit 提交容器成为一个新的副本
# 命令和git原理类似
docker commit -m="描述信息" -a="作者" 容器id 目标镜像名:[TAG]
实战测试
# 1、启动一个默认的tomcat docker run -d -p 8080:8080 tomcat
# 2、发现这个默认的tomcat 是没有webapps应用,官方的镜像默认webapps下面是没有文件的! docker exec -it 容器id
# 3、拷贝文件进去
# 4、将操作过的容器通过commit调教为一个镜像!我们以后就使用我们修改过的镜像即可,这就是我们自己 的一个修改的镜像。
docker commit -m="描述信息" -a="作者" 容器id 目标镜像名:[TAG]
docker commit -a="kuangshen" -m="add webapps app" 容器id tomcat02:1.0
如果你想要保存当前容器的状态,就可以通过commit来提交,获得一个镜像,就好比我们我们使用虚
拟机的快照。
入门成功!!!!


评论区